Related products
-

In-line Infusion Monitoring
Testia’s In-line Infusion Monitoring is leading the way to fully automated composite processes
(more…) -
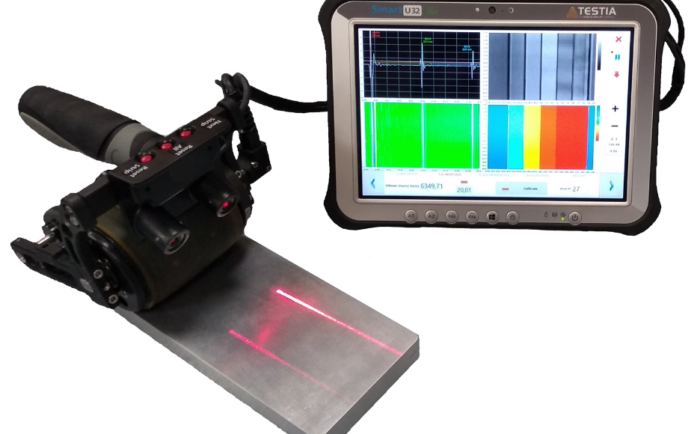
Thickness Tool
20 times faster and accurate thickness mapping of blended-outs overall aircraft skin
-

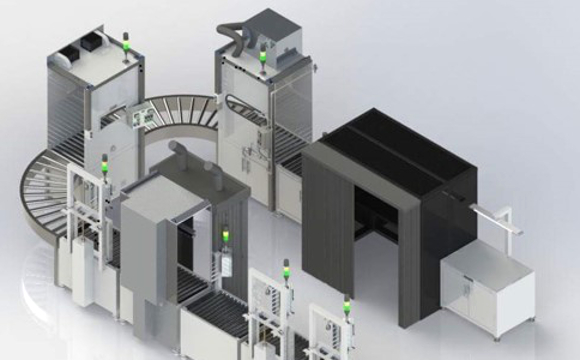
Penetrant Testing Systems
Performance and flexibility with Testia’s Penetrant Inspection (PT) systems for production parts and MRO
(more…) -

Scratch View
Cost-effective easy-to-use device for quick and accurate scratches measurements above 0.03 mm
-
Line View
Cost-effective easy-to-use device for quick and accurate gaps / flushes inspections above 1mm
-