Produits similaires
-

-
Machines d’inspection UT
Testia can implement the right customized or off-the-shelf solution that will bring you the optimal quality, productivity and Return of Investment. (suite…)
-

Remote Assistance
Expertise sur site et sécurisée pour un support en temps réel pour la résolution de vos problèmes.
-
-
-
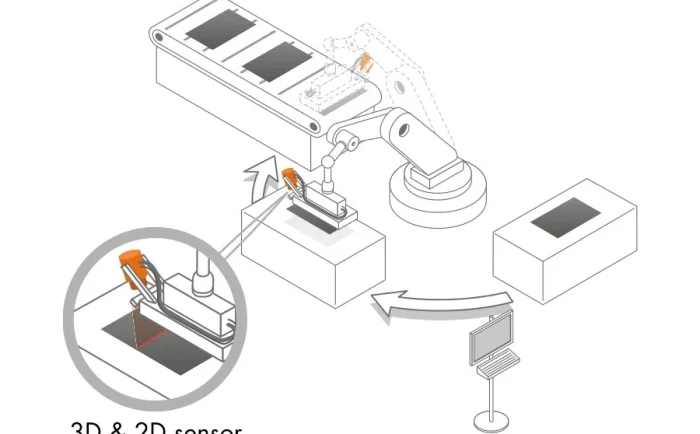
PF Inspect
Solution d’inspection et de mesure pour vos productions composite