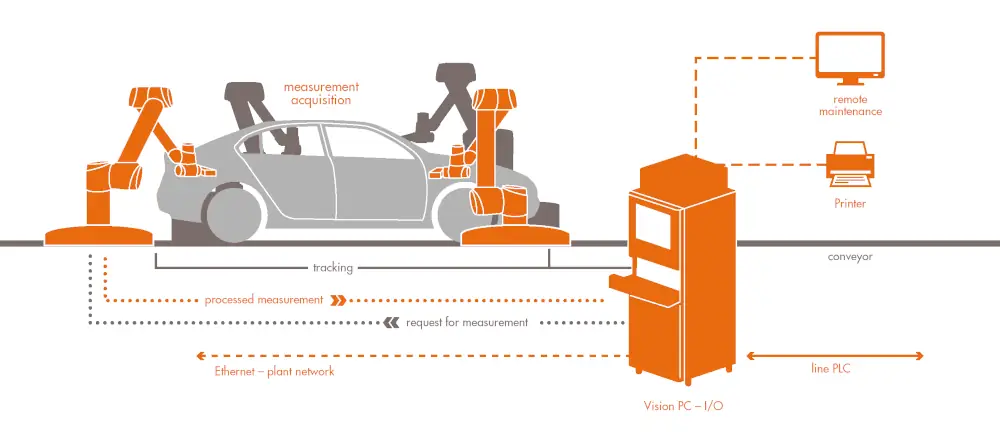
Gap Robot
Estación automatizada de medición de huecos y rasantes adecuada para líneas de producción flexibles (más…)
NDTkit UT
Toma de decisiones segura mediante análisis automatizado de muchas fuentes de datos UT y generación de informes asistida (más…)
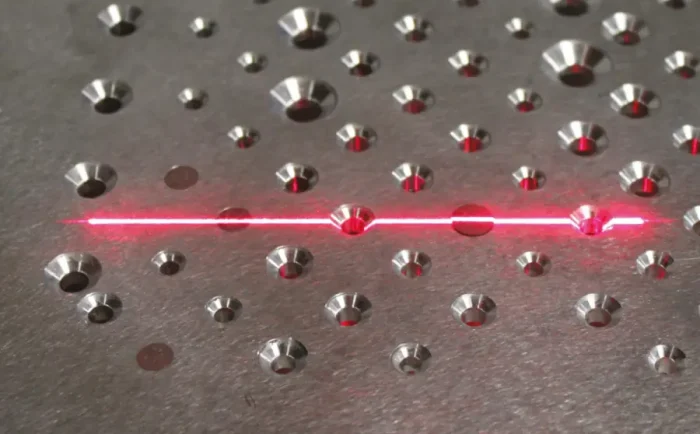
Rivet Inspect
Simplifique la inspección de fabricación y reduzca el tiempo de inspección con el control automatizado del posicionamiento de los remaches. (más…)
UE1 Box
Dispositivo multi-método ultracompacto, personalizable e integrable para inspección y generación de informes.
(más…)
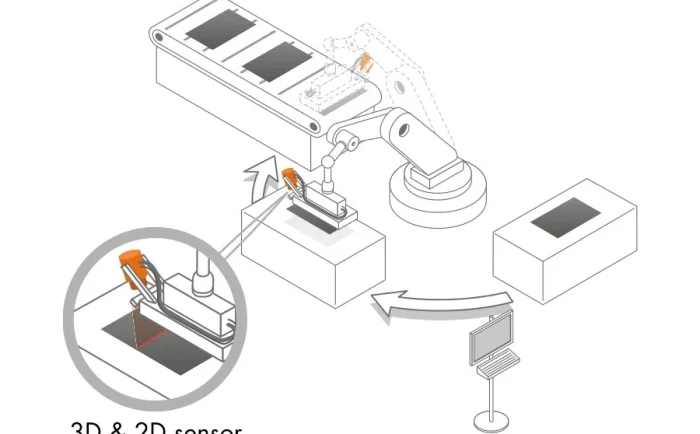
PF Inspect
Solución de inspección y medición para sus procesos de materiales compuestos (más…)