Ähnliche Produkte
-

-
-

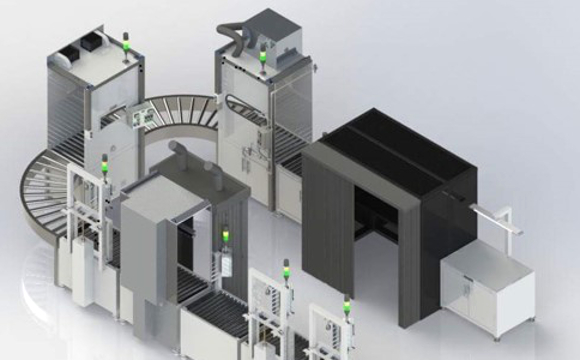
PT-Anlagen (Eindringprüfung)
Flexibilität und Leistungssteigerung bei der Eindringprüfung erreichen, dank Testias PT-Anlagen für die Produktion und MROs.
(mehr …) -

-
-
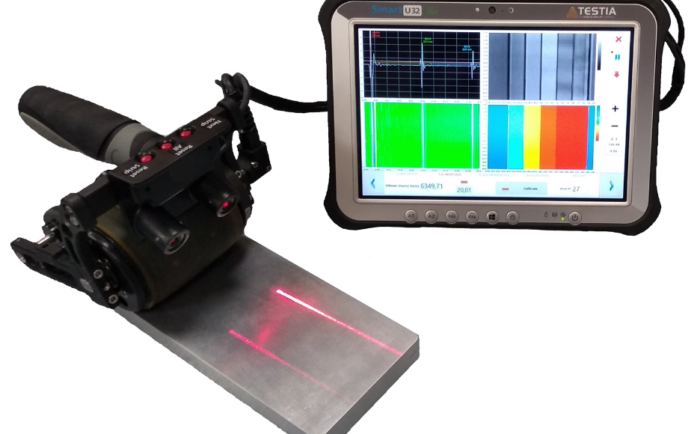
Thickness Tool
130 Mal schnellere und genauere Restdickenmessung auf der Flugzeug-Außenhaut. (mehr …)