Productos relacionados
-

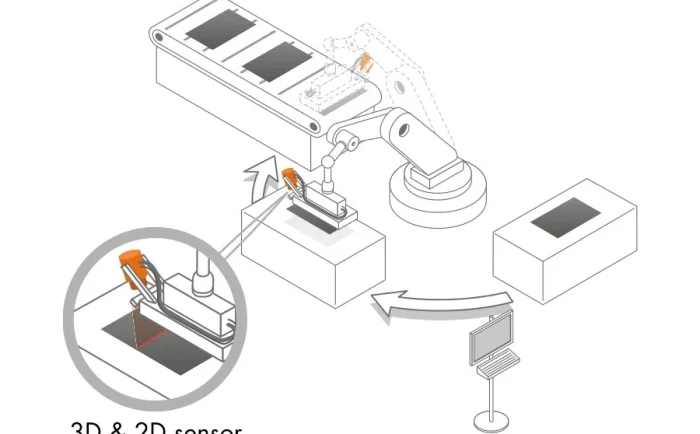
In-line Infusion Monitoring
El In-line Infusion Monitoring de Testia está liderando el camino hacia procesos de materiales compuestos totalmente automatizados (más…)
-
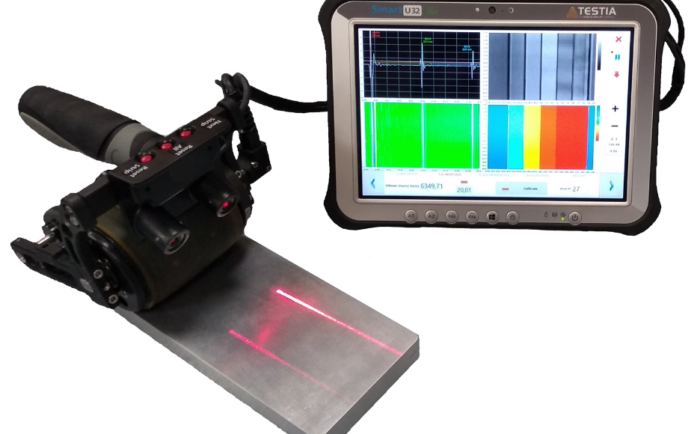
PF Inspect
Solución de inspección y medición para sus procesos de materiales compuestos (más…)
-
-
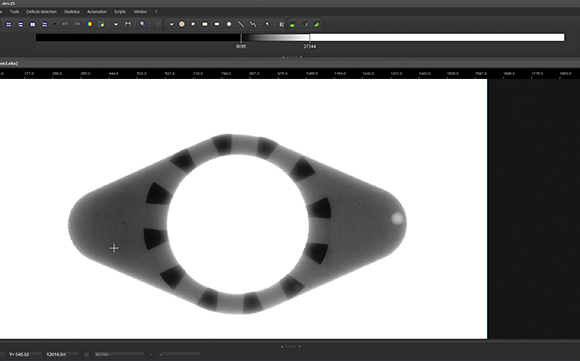
Thickness Tool
Mapeado de espesores 130 veces más rápido y preciso de áreas de diferentes materiales (más…)
-

-
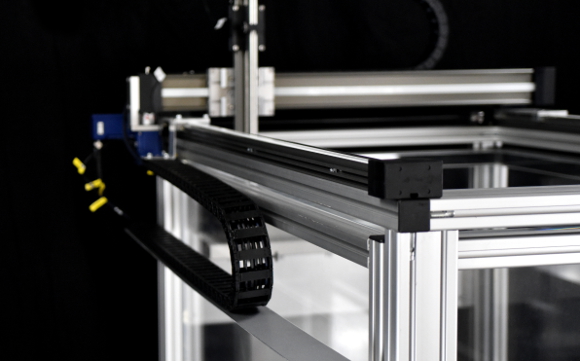
Smart Scan
Escáner configurable para una adquisición fácil y precisa con alta rentabilidad. (más…)