Produits similaires
-

-
-

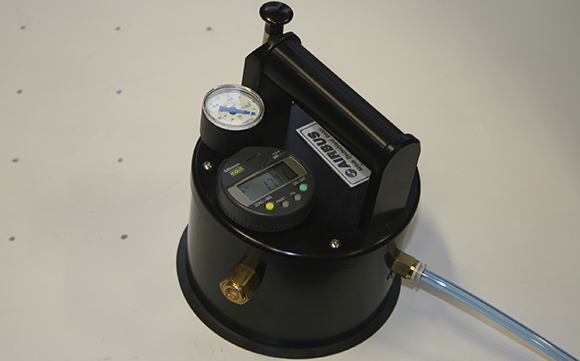
Elasticity Tool
Vérificateur d’intégrité des panneaux en nid d’abeille, simple et rapide pour assurer la sécurité structurelle du courant alternatif (ancien outil ELCH) (suite…)
-

-
-
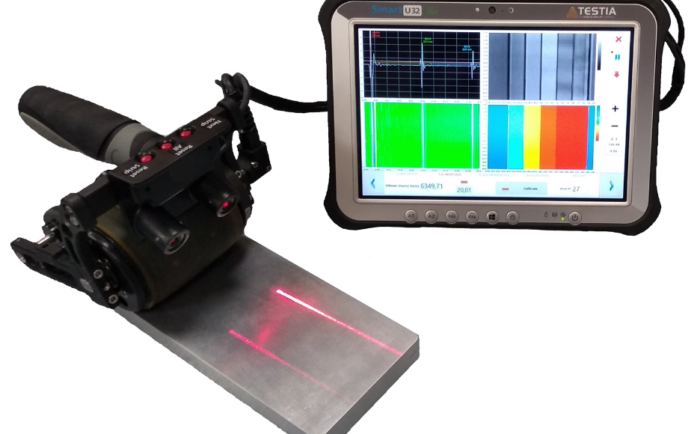
Thickness Tool
Cartographie de l’épaisseur des zones mélangées : 20 fois plus rapide et précise (suite…)