Related products
-

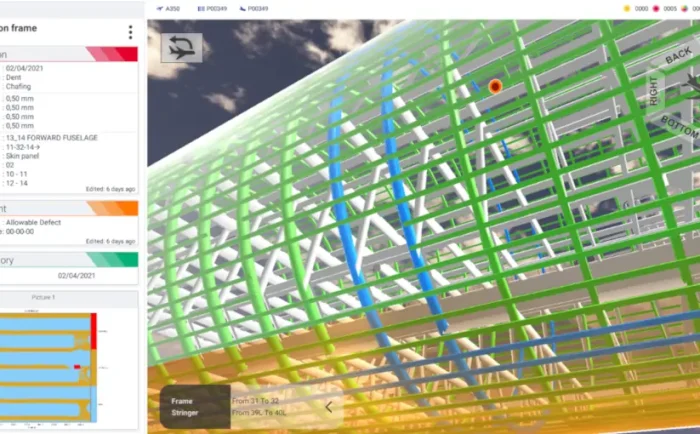
Asset Manager
Simplified, faster and high-end management of your maintenance activities through a dedicated 3D model.
(more…) -
-
-
-

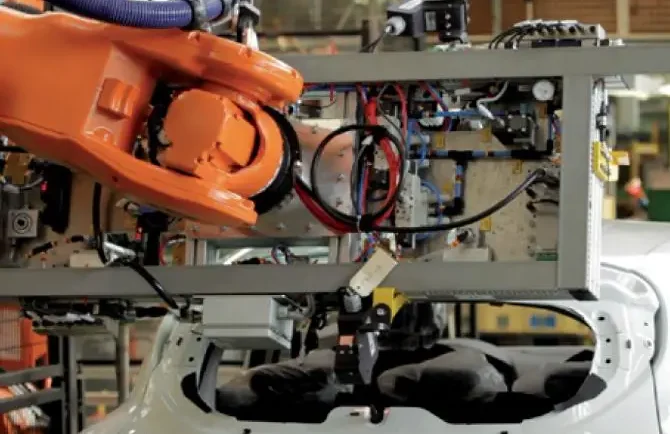
Robot Guide
An automated guiding solution for the tooling of the future (more…)
-

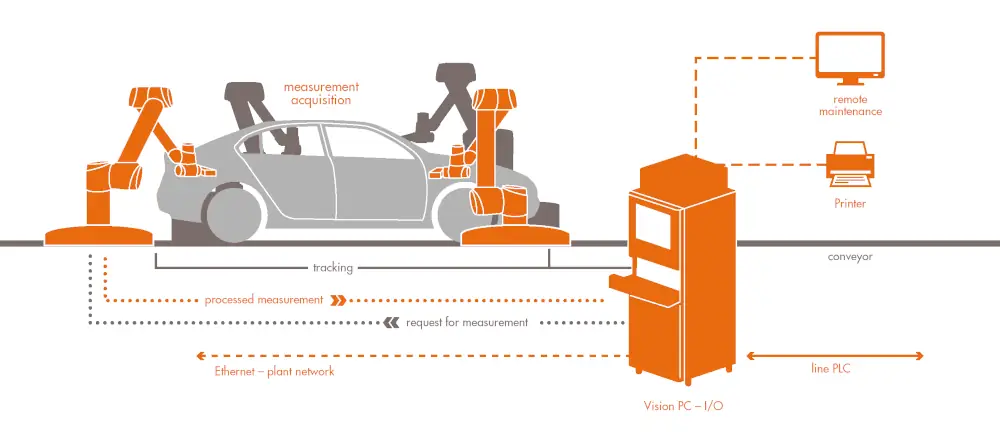
Line View
Cost-effective easy-to-use device for quick and accurate gaps / flushes inspections above 1mm